THE NON-DESIGNER'S TYPE BOOK
Adobe PageMaker.....
PageMaker includes built-in shortcuts for some of the most commonly used special
characters so you don't have to type the Alt codes (but you can always use any of the Alt
codes if you choose in PageMaker). In addition, there is information below about other
special PageMaker features that help in the typographic world.
Character Type it this way What is it?
i
Alti
opening single quote
1
Alt]
apostrophe, closing single quote
и
Alt Shift [
opening double quote
я
Alt Shift ]
closing double quote
-
Alt - (hyphen)
en dash
—
Alt Shift - (hyphen)
em dash
®
Alt r
registration symbol
©
Alt g
copyright symbol
•
Alt 8
bullet
ä Alt 6 section symbol
Non-breaking spaces
These spaces of varying width do not break; that is, the computer does not see them as word spaces
at the end of a line, so if a non-breaking space is between two words, those two words will never separate.
Also use these spaces to make quick indents, consistent spacing in a line of items, etc.
em space (width of point size) Control Shift M
en space (half of an em space) Control Shift N
thin space (quarter of an em space) Control Shift T
non-breaking regular space Control Alt Spacebar OR Control Shift H
Special hyphens
Type the discretionary hyphen between syllables in a word when you want to hyphenate a word at the end of a
line, but you want the hyphen to disappear if the text gets edited. You can also type this invisible character at
the beginning of a word, and that word will never hyphenate.
- (discretionary hyphen) (v6.5) Control Shift Hyphen (v6 or v5) Control Hyphen
Type the non-word-breaking hyphen between hyphenated words so those words will never separate, even at
the end of a line. It will look just like a regular hyphen. You might want to use it in phone numbers.
- (non-word-breaking hyphen) Control Alt Hyphen
Kerning
Position insertion point between two characters, or select a range of characters. Then:
amount delete space add space
.001 (thousands of an em) type in negative amount type in positive amount
in the control palette (-.003) in the control palette 1.007)
.01 (hundredths of an em) Control Alt LeftArrow Control Alt RightArrow
.04 (quarter of an em) Alt LeftArrow Alt RightArrow
OR Control Backspace OR Control Shift Backspace
Remove all kerning Select text, press Control Alt К
APPENDIX C: FONT UTILITIES
227
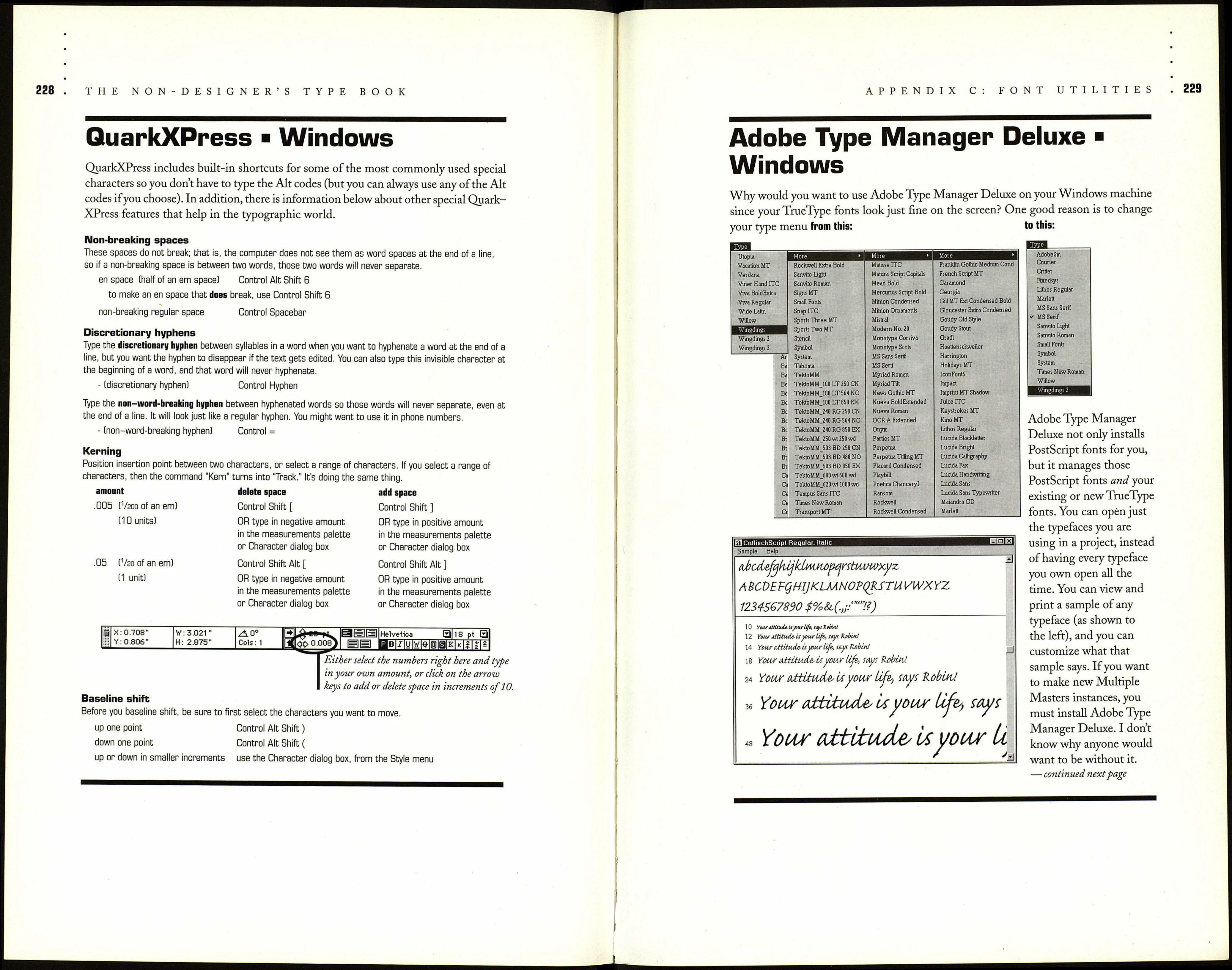
Windows
Baseline shift
The baseline shift amount in the control palette (shown below) is determined by the amount you set in the
General Preferences (shown farther below). Hold down the Shift key to nudge by ten times the amount set
in Preferences. That is, if your nudge amount is set at 1 point, Shift-nudge would move items in 10-point
increments.
Before you baseline shift, be sure to first select the characters you want to move.
Ш ІРІШ |S an vito Roman
jjj інІв|/|у|вІе|с|сГ
12 ■
14.4 ■
Either enter an amount here in this box, \
or click the up and down arrow keys.
Preferences
Measurements in: Picas
Vertical ruler: Picas
n г
points
Layout problems: Г" Show loose/tight lines
V Show "keeps" violations
Graphics display: Г Gray out
(• Standard
_________________Г High resolution_________
Control palette -
Horizontal nudge: Op.1
Picas
и
Vertical nudge: Op.1
Picas
"3
OK
Cancel
Г Use "Snag to" constraints
More...
Map fonts..
CMS setup..
Save option: <• Faster
С Smaller
Guides: ^ Front
Г Back
The amount you enter
in these boxes, plus
the measurement
system you choose here
(the current system is
"Picas, ") determines
how much the base¬
line gets nudged.